
滚动继续内容
这意味着该程序不会从循环中回来,也不会留下那里很长时间?你好,
看着#756的远程程序,并注意到我仍然必须添加控制代码,可以猜测,主循环需要多长时间?
我想知道5xpwm频道是否可以添加到循环中并工作正常。
编辑:我尝试在主循环中添加一个休息并居住SIM时钟,但SIM不会再次“看到”休息?
干杯,C.
嗨J,我检查了模拟器中的计算。
中断被禁用。
BMP280 3.1女士
罗盘8.6女士
转换字符串=#单个需要很多时间,并且在模拟时删除了它们。
只有几个消息/秒处理,飞行控制太慢了?
正常的R / C控制是50次/秒。
好的。
我是正确的,那么需要在50 /秒的计时器中断?对于控制,使用几个/秒的数据,我们无法真正更改这些程序。
我仅尝试一个单独的测试程序,仅用于带示波器和测试三角楼的PWM,看看会发生什么。
编辑:只是觉得!我们在接收器上有一个备用照片
谢谢,C。
上次编辑:
您是否使用需要控制或还需要PWM的电机?嗨J,
好的。
我是正确的,那么需要在50 /秒的计时器中断?对于控制,使用几个/秒的数据,我们无法真正更改这些程序。
我仅尝试一个单独的测试程序,仅用于带示波器和测试三角楼的PWM,看看会发生什么。
编辑:只是觉得!我们在接收器上有一个备用照片未使用18F4431,此刻在其之间和18LF4620之间具有2x曲目,可以使用/修改。我必须需要这一点,因为接收器PCB有5 + 1GND连接器PWM
谢谢,C。
您可以从2018年获得一些代码进行伺服控制
附件
-
6.3 KB. 意见:1
上次编辑:
你说你只有一个伺服。控制是位置(例如0至180度)嗨,(18f4431 5x伺服输出)
我已经疯狂了,就像我敢于#767的程序一样,SIM可以好。
我现在必须习惯它,并弄清楚如何更多地清理它。
我注意到它具有读取数据输入,这是方便的。如果可以在两个简单引脚之间发送串行数据,则可以使用18LF4620和18F4431之间的备用轨道。
当我更习惯时,我会添加额外的伺服。
C
PWM是不同的,例如,电机的速度,0到100%
嗨J,你说你只有一个伺服。控制是位置(例如0至180度)
PWM是不同的,例如,电机的速度,0到100%
我们越过消息> <:0
正如你可以看到我更新了#767中的程序并编辑#768
我正在使用Tricopters,具有3倍电机和一个方向舵伺服。
信号都看起来相同。直到现在,我没有给它它,但是一个普通的发射机以串联发送所有通道的串行信号。这是ppm。在接收器无线电时,它将它们分开到通道中,并且在我的系统上,通道通过控制器板(KK2),这具有陀螺仪和加速器,以稳定工艺。KK2的输出源于电机和伺服电机。必须首先设置KK2以与您的Craft Tricopter Quadcoter平面等一起使用。
我为其他突发事件添加了额外的频道。
C
你好,
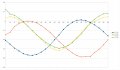
我在15°旋转360°大约360°的罗盘模块,以制作图表
这是图表:
对我来说,能够看到正在发生的事情是非常令人愉悦的。你会注意到,正弦波是一个平坦的,我认为是由z z向上和dn读数引起的,处于不同的尺度,因此挤压图表。
我假设这些数字需要纠正,因此它们均匀地在中心线和下方。Aslo红色和DK蓝色波浪在180°不会交叉。
我将使用Magmaster进行更正偏见,并看看这些行看起来像什么。
编辑:我删除了z列,这是结果:
C。
我在15°旋转360°大约360°的罗盘模块,以制作图表
这是图表:
对我来说,能够看到正在发生的事情是非常令人愉悦的。你会注意到,正弦波是一个平坦的,我认为是由z z向上和dn读数引起的,处于不同的尺度,因此挤压图表。
我假设这些数字需要纠正,因此它们均匀地在中心线和下方。Aslo红色和DK蓝色波浪在180°不会交叉。
我将使用Magmaster进行更正偏见,并看看这些行看起来像什么。
编辑:我删除了z列,这是结果:
C。
附件
-
 197.3 KB. 意见:4
197.3 KB. 意见:4 -
 159.1 KB. 意见:3
159.1 KB. 意见:3


上次编辑:
计算与arctan的角度看错。你好,
我在15°旋转360°大约360°的罗盘模块,以制作图表
这是图表:
对我来说,能够看到正在发生的事情是非常令人愉悦的。你会注意到,正弦波是一个平坦的,我认为是由z z向上和dn读数引起的,处于不同的尺度,因此挤压图表。
我假设这些数字需要纠正,因此它们均匀地在中心线和下方。Aslo红色和DK蓝色波浪在180°不会交叉。
我将使用Magmaster进行更正偏见,并看看这些行看起来像什么。
编辑:我删除了z列,这是结果:
C。
足够快,足够快吗?SPI最多需要几十微秒。嗨J,
我有点卡住了!
我在18F4431上将罗盘偏见读数添加到程序中,因为这将能够在远程PCB上的主页上完成所有其余的。
如您所知,指南针连接到主电页面18LF4620。罗盘数据如何发送到4431,并根据需要尽快收到?
C
| 螺纹启动器 | 类似的线程 | 论坛 | 答案 | 日期 |
|---|---|---|---|---|
| 添加中央真空遥控器 | 通用电子聊天 | 7. | ||
| 遥控 | 自动化,机器人和控制 | 13. | ||
| Logitech Harmony 900旧遥控帮助。 | 通用电子聊天 | 3. | ||
| 红外遥控器 | 通用电子聊天 | 5. | ||
| 了解无线电控制(通过位置远程控制) | 无线和RF设计 | 62. |


