
这个项目描述了如何设计一个定制的倾斜仪子系统,能够精确地测量角度到千分之三度。
这是我们在AAC上设计的项目和子系统之一,旨在向您展示新的思想、想法和技术。
这个项目创建了一个可能用于精密仪器的倾斜仪子系统。有了这个设计,我就可以记录下百分之一度的角度并且知道它是准确的。我可以把它缩小到千分之一度然后有99。999999%的把握知道它在实际倾角值的千分之三度范围内。

项目的最终构建
该项目创建了一个1轴数字和机械倾斜仪,用于科学仪器或机械。该电路板利用了来自不同制造商的集成电路,并展示了几种不同的技术,您可以将其纳入您的设计中。

一个非常简单的项目框图
本文是展示使用muRata SCA103T-D04(±15°)创建精密倾斜仪电路所需的一些机械和电气考虑的系列文章中的第一篇MEMS.基于倾斜计IC。未来的文章将更详细地介绍模板设计,PCB布局考虑和对设备操作的分析。
1.选择组件
以下是您需要复制我的设计的主要组件的简体BOM:
- SCA103T-D04±15°测斜仪
- MSP430单片机
- AD8244单位增益放大器
- LTC2380IDE SAR ADC
- LT1027LS8精密电压基准
- CP2102N UART-to-USB转换器
设计是如何工作的?
设计的中心是SCA103T-D04±15°倾角仪IC.为了说明这一点,我想说的是,muRata为了本文的目的免费送给我这个倾角仪。遗憾的是,我得知(太晚了)这一特定组件将停止使用。村田官网目前表示,SCA103T-D04的“最后一次购买日期”是2019年6月15日。
倾斜度计输出的传感器通过模拟设备发送AD8244单位增益放大器LTC2380IDE连续近似寄存器(SAR)模拟-数字转换器(ADC)来自线性技术(现在是模拟设备的一部分)。我选择了24位的SAR ADC而不是16位的设备,因为我很清楚在物理上和实际上都不可能将分辨率降至0.00000001°。我的目标是17-18位,或者0.0001度。这是一个有点昂贵的选择,所以如果有人想稍后用16位ADC重新创建这个设计,您会很高兴地知道,我选择了一个可用的pin兼容的16位版本。
然而,我只打算做一个这样的板子,所以我宁愿有更多的分辨率,而不是太少。此外,我选择的ADC有一个集成数字平均滤波器,因此应该可以通过重复测量来统计从倾斜度计到16比特的分辨率。
ADC值由TI MSP430单片机读取。“透明国际”的MSP430的微控制器是我在过去几个项目的mcu的选择。我可以选择MSP430FR2433访问额外的GPIO线,但这个项目不需要其他引脚。的MSP430FR2633有电容式触摸允许外部校准按钮在未来的控制板上实现的pin能力。
然后将该值传递给硅实验室CP2102NUART-to-USB转换器。
关于倾斜仪
的Murata Sca103T-D04高性能差分1轴倾斜仪的模拟分辨率为0.001°(16位),输出噪声密度为0.0004°/√Hz,偏置温度依赖性为±0.002°/°C。

SCA103T-D04。从图片日本村田公司
集成的11位ADC通过SPI引脚提供直接的数字转换输出。每个内部传感元件提供0.5-4.5VDC范围内的单端输出,0-0.5VDC和4.5-5.0VDC预留,以指示错误条件。
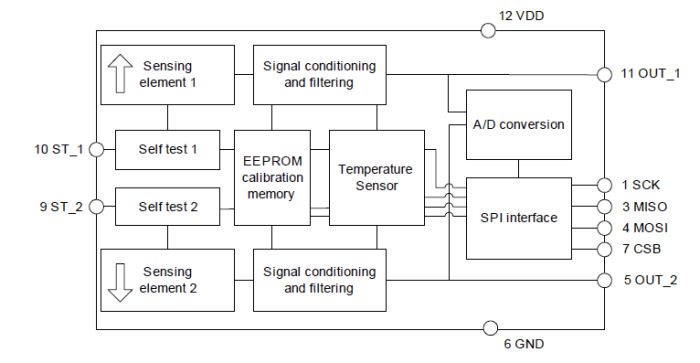
功能框图的sc103t - d04,从数据表
集成电路内部有两个相同的加速度计,它们沿同一轴排列,指向相反的方向。输出是为了馈送差分放大器或差分输入ADC。这微分测量技术有助于降低噪声并消除共模测量误差。
muRata的数据表表明,该设备能够识别角位移,分辨率为0.001°,相当于~14位。低温依赖性(可修正)和低噪声密度(不可修正),以及muRata发布的设备整个运行范围内的最差规格,让我相信在某些情况下,性能可能会比规定的要好。
作为“硬式休斯”(Hard-Way-Hughes),如果可能的话,我想突破极限。
2.方案设计
成功项目的第一步是创建功能原理图设计。这涉及到研究所涉及的ic的引脚并进行适当的连接。
我在一个组件一个组件的基础上接近我的董事会。
- 电力:问题包括电流来源,LDOs的使用,和电容。
- 倾角计:由于SCA103T-D04的自检功能的设置方式,我在BOM中添加了另一个IC,以防止两个引脚同时处于活动状态。
- 信号缓冲器和模数转换器:我需要考虑如何路由信号通过各种滤波器和放大器,以确保信号的完整性。
- 微控制器:用MSP430分配引脚将发生在固件编写阶段。
您可以阅读更详细的设计过程中这部分的详细说明本文就如何设计一个功能原理图。
3.PCB布局
在将示意图转换成电路板布局时,需要考虑多种因素。在这种情况下,我特别需要确保电压参考集成电路是机械和热隔离的。我还决定实现一个保护环,以减少泄漏电流。
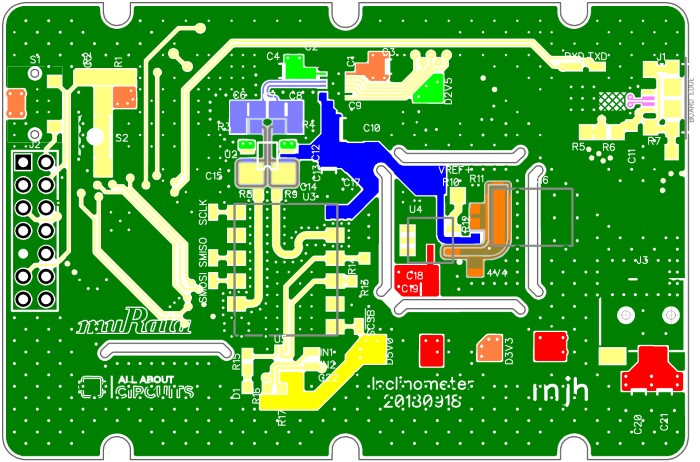
板子的最上层
确定元件的位置,轨迹的长度和路径,以及设计噪声的排除都是重要的设计。
我创建了一个带有两个外层的4层板,用于组件和信号,一个地面,一个层,以及混合动力的一层。
木板按顺序分层
可能产生大量热量的组件(LDOs, MCU)被放置在板的底部,组件的顶部可以机械地连接到铝PCB载体上的突出部分。这样做的目的是在ICs有机会扩散到PCB的其他部分之前,将其过度的热量通过金属散发出去。
我在另一篇文章中讨论了设计这个PCB时需要考虑的具体问题。如果你想了解更多关于这个过程,包括我的电路板如何隔离板内部的热和应力损伤,请阅读如何将原理图转换为PCB布局。
4.写固件
编程定制板的第一步是考虑哪个插脚连接到哪个设备。
为了给自己提供尽可能多的信息,我在代码中添加了一个ASCII连接图。这一步不是必须的,但是我发现在源代码中有一个图作为参考是很有帮助的。
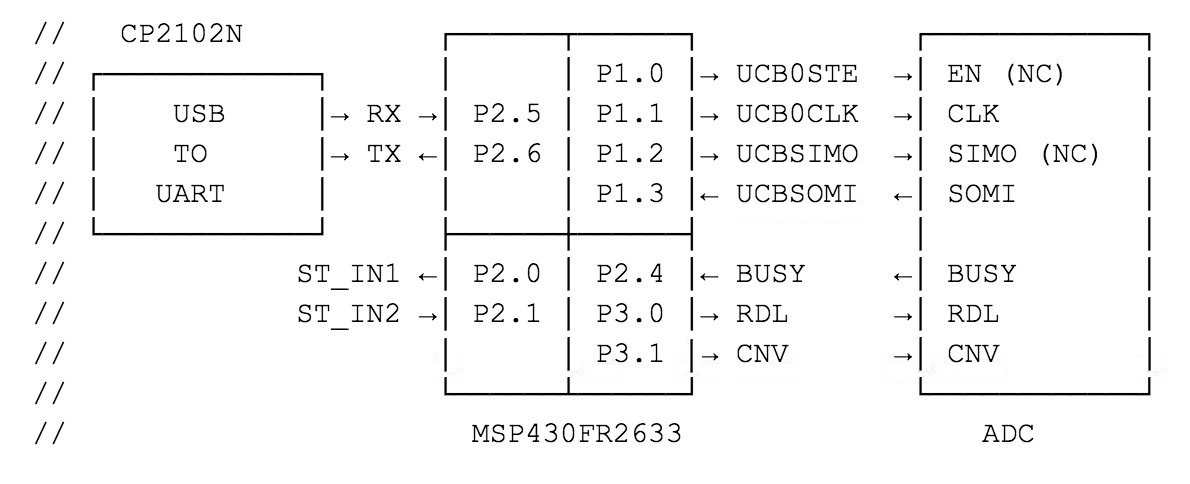
我的pinout的表示,我包含在我的代码中以供参考
让我们把注意力转向MSP430,你不能用你的微控制器做任何事情,直到你配置它。为此,你必须确定引脚、时钟源、电源模式等。在这里,使用一个高质量的评估工具,你投入的每一分钟和每一美元都是值得的。在我的例子中,我之前有足够的MSP430经验来接近正确的程序,在论坛贡献者的帮助下,我可以快速完成任务。
除了pin赋值等,我还需要考虑如何管理数据,考虑到这个子系统能够收集多少数据。为此,我选择以二进制值的形式查看串行监视器中的数据,以便快速评估我的设备是否遇到了噪声。
如果您想了解更多关于这个主题的信息,包括寄存器是什么以及如何使用它们,请查看我的文章MSP430的固件设计。
5.机械方面的考虑:设计房屋
分辨率为0.001°转换为将PCB的一个边缘的高度改为大约1μm(接触点之间的距离为约9.5cm)。这是一个非常小的位移,基本上保证了在板支架内部的每个调节后必须执行数字校准。
我选择将板刚性固定到板支架上并调整支架,而不是将板上调整。
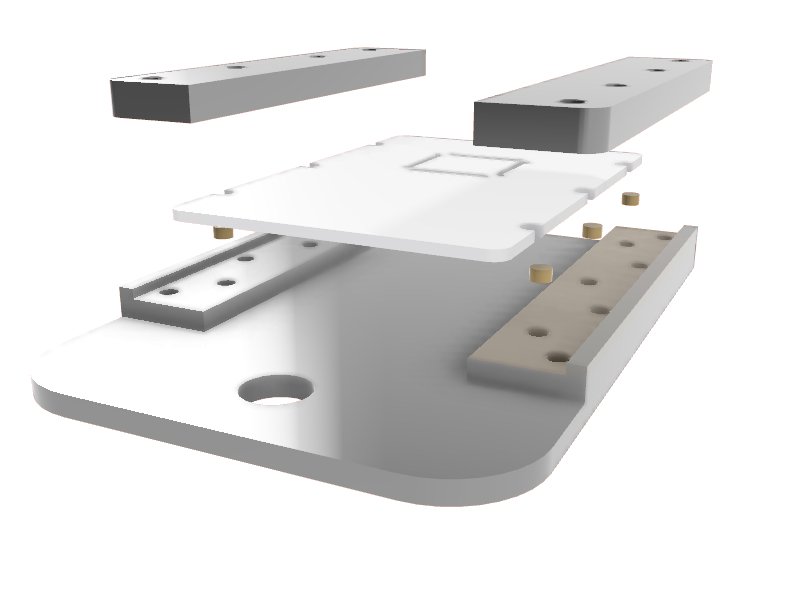
如上所示是PCB支架、校准引脚、PCB和PCB夹的爆炸渲染
如果我选择像数据表建议的那样使用简单的数字校准,我可能会在办公室失去“hard way Hughes”的昵称。由于我的“街头信誉”处于危险之中,我选择通过安装在板的一端的差动驱动螺杆机构,在板的另一端附加两个M3的抛光橡子螺母,在板支架的另一端进行机械调整。
在以后的文章中,您可以看到我对设计我的住宅的机械考虑的完整分解。
6.去生产
记住,AAC板是为了教育目的,所以我们通常只做一个单一的旋转每个板。beplay网页版本您的生产需求和下订单的原型的经验会有所不同。
你可以下载我的设计文件如下:
7.描述该设备
既然我们的倾斜度计从制造中回来,我们可以开始表征我们的设备。
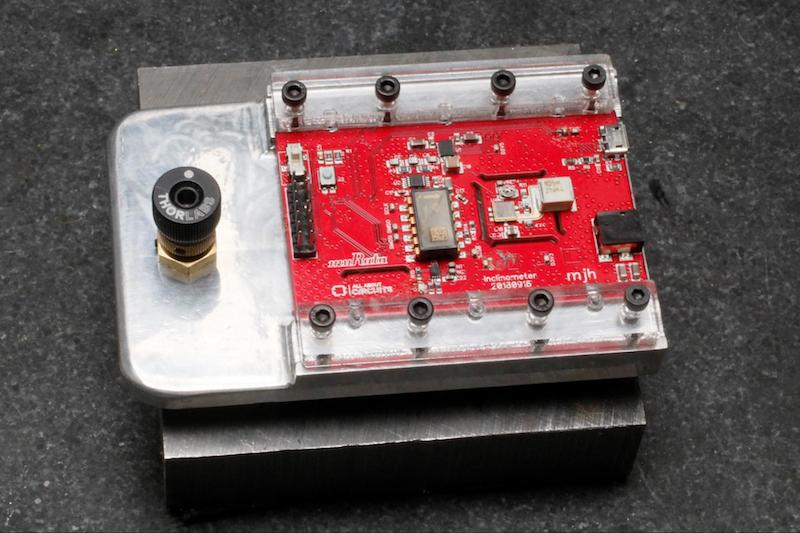
我们闪亮的新董事会(如其董事会持有人所示)
噪音
我最关心的电路部分是电压参考,所以这是我首先关注的测量。如果我重塑PCB,这是我重新设计的电路的一部分。我把我的电影挂在了我的示波器上并开始测试。
在我的测试过程中,我发现了一个“打嗝”——一个反复出现的异常。
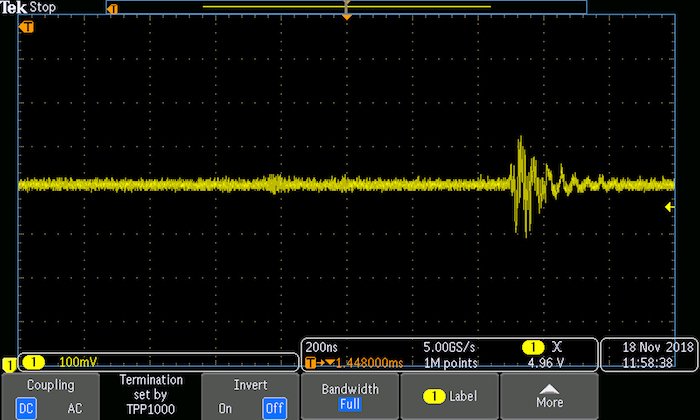
一个示波器捕获显示狡猾的“打嗝”问题
如果这个电路板是用于大规模生产的,我肯定需要解决这个问题,特别是因为我现在还无法判断噪音是良性的还是更严重的迹象。然而,这种特殊的噪声事件似乎不会对器件的性能产生负面影响。
这是一个很好的例子,设计的下一个迭代将包括更多的测试点,包括一个同轴测试连接,以实现更完整的测试和测量。
有关如何创建测试环境以及噪声密度如何影响组件选择的更多信息,请查看我对该主题的未来文章。
8.数据分析
当一切都说完了,我需要一种方法来查看和分析我的倾斜仪收集的数据。我在固件一节中提到了一些这方面的内容,但下一步是处理数据。我选择使用Mathematica来创建这个设置:
然后我进行了试验,以确定我是否可以解释和表示数据集。
如果您对统计和数据建模感兴趣,您可以在我即将发表的文章中阅读更多关于我在数据分析方面的冒险经历,我将在文章中描述这些尝试。
总结一下:比我实际需要的还要精确
我开始制作一个非常精确的倾斜仪。我没有达到我荒谬的目标,但我确实创建了一个子系统,其精度比我一生都需要用到的还要高。实际上,如果一家公司需要一个比这个董事会设计的决议更大的决议,他们会雇佣一个专门从事计量的人来设计它。
而且,当我重新设计我的电压参考部分时,该设备表现良好。我认为这个项目是成功的。
这并不是说没有更多的工作要做。需要添加设备的温度补偿方程,并在其整个工作范围内对设备进行校准和指定。但是这些活动是很耗时的,并且不会给本文增加太多内容,所以我现在将它们推迟。
如果你对未来的项目有建议,请在下方留言。谢谢!






我喜欢一系列设计,原型化和测试项目的一系列文章的想法。我真的很期待该系列中的下一个文章。
我想知道这是否为我解决了一个问题。我不需要这种精度,但我需要一个手持设备(音乐MIDI风控制器)的“角度检测器”。我可以使用三轴加速度计来确定仪器静止时的角度,但任何加速度(例如仪器的轻微晃动)都会使角度数值变小。我想知道没有加速度的角度。2 . hold the instrument:拿着乐器,拿着乐器,从水平方向下降了10度,为了颤音我摇了摇它,但是角度没有从10度改变。
您的倾斜度计方法是否解决了我的青睐?
谢谢
戴夫