
C-Biscuit系列
- C-Biscuit:黑客和业余爱好者的机器人平台
- C-Biscuit:设计选择和理由
- C-Biscuit功率:5V 3A弹板调节器
- C-Biscuit功率:5V调节器的撬棍保护电路
- C-Biscuit:手术的大脑
- C-Biscuit功率:调节器和撬棍电路的组装和测试
- C-Biscuit:监视机器人的健康
- C-Biscuit:机器人系统体系结构
- C-Biscuit:RCB的示意图 - 微控制器,电机控制器
- C-Biscuit:RCB的示意图 - 功率,步进
- C-Biscuit:机器人控制板的布局和组装
- C-Biscuit:系统集成和测试
介绍
这是一个多部分,多作者系列的开始COllaborativebot我ntegreds系统C矿石,你nmanned我nteractivity和tlemetry。基于弹板四边形,这个想法是协作构建一个“核心”模块,该模块可以放入各种车辆底盘(四轮驱动器,陆虎等)中,并轻松地重新配置以执行每辆车的任务。Wandboard是一个基于Freescale的四核I.MX6 Cortex-A9处理器的系统对机器模块(SOM),并且能够运行Linux,最重要的是机器人操作系统(ROS)。

一个非常有能力的机器,价格约为$ 130美元
Trevor Gamblin,,,,尼克·本岑(Nick Bentzen), 和帕特里克·劳埃德(Patrick Lloyd)是项目的主要作者,但是可以在上面找到代码和设计文件github。这是一个正在进行的工作,因此不能保证那里的代码稳定或工作顺序。定期在此处查看稳定的版本和更新的教程。
系统总览
核心模块可以分解为几个关键的硬件和软件组件,每个组件都可以在下面的流程图中看到:
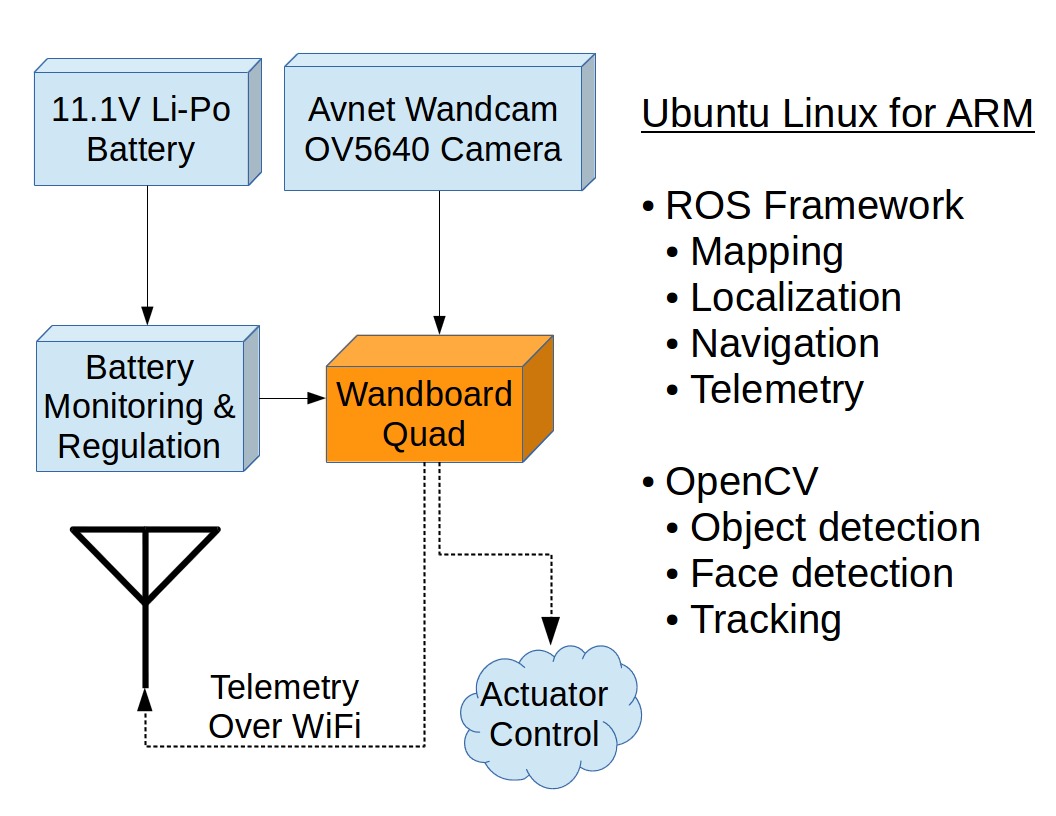
将为各种子系统生产单独的教程,而诸如映射/本地化和计算机视觉等更高级的概念可能需要一些填写所有详细信息。在某些情况下,作者似乎正在重新发明轮子(例如,建造我们自己的双通道电源板,而不仅仅是购买一个)。但是,该项目的主要目标是为尽可能多的机器人元素提供学习平台。
入门
要跟随教程,您将需要这些部分来构建核心:
- 弹板四边形
- 用于遥测的弹板天线套件
- 魔杖外壳
- AVNET WANDCAM OV5640相机
- SD卡(> = 16 GB)
- IMAX B6电池充电器
- Turnigy 5000mAh 3s 30c Lipo电池
- 基于MPU650的IMU突破
此外,如果没有某种形式的车辆进行测试,核心模块本身并不是特别有用。最初,它将建立在基于4WD陆虎的顶部该平台来自Dfrobotics和L298双H桥直流电动机控制器。它使我们能够快速开发核心,并在以后的更多临时平台上专门花费时间。

现成的机器人底盘套件
在后续的教程中将详细介绍其他组件,例如构建弹簧电压调节器所需的内容。
合适的工作工具
一路上,我们将在与特定子系统相关的文章中提及完成本节所需的任何特殊工具。话虽如此,构建需要一些东西,而有些则不需要,但您可能会发现有用。两者在下面列出:
要点
- 数字万用表
- 基本螺丝刀套件或多工具
- 割绳/脱衣舞娘
- 平坦的桌子或其他工作区
- 22 AWG接线
很好
- 示波器
- 拉链链条
- 额外的接线和USB电缆
以下部分将持有描述这些子项目的文章。在此页面上添加书签,并定期查看以获取更新。
系列的下一篇文章:C-Biscuit:设计选择和理由
全面披露:Allaboutcircuits.com与Freescale(现为NXP半导体)保持了广告合作伙伴关系,但该项目绝不隶属于该关系,任何NXP产品都完全通过我们的工程师选择。
为自己自己尝试一下!得到bom。






这个底盘有多大?