
麻省理工学院设计了定制的硬件加速来激发机器人的实时响应
2021年1月22日通过杰克赫兹为了推动机器人的实时响应成为现实,麻省理工学院的研究人员已经转向了他们自己的内部技术,称为“机器人形态计算”。
从电气工程角度来看,机器人是一个具有挑战性的领域,因为它需要极低的延迟计算。在大多数情况下,机器人希望他们的机器人实时回应他们所呈现的刺激。
然而,机器人系统的决策过程通常是这样的:首先,它必须通过传感器和摄像头评估环境;第二,它必须映射环境和定位自己;最后,它必须决定行动方针。只有在所有这些步骤都完成之后,系统才会真正执行某个操作。
.jpg)
机器人必须同时本地化和映射(SLAM)。图片由SIFSOF.
这里的问题是机器人系统要处理大量的数据采集、处理和分析前它甚至可以移动。这不利于机器人专家所希望的实时决策。
当一些开发人员转向软件优化来解决这个问题时,麻省理工学院的一组研究人员已经提出了一个基于硬件的解决方案。
硬件加速的简史
要了解MIT研究人员在盒子外面的实时机器人运动外,可能首先有助于回去1999年英伟达GPU的普及。
这个想法很简单:标准的CPU是一个可靠的多用途设备,在所有任务上都很出色,而在任何任务上都很出色——一个包罗万象的硬件。但是,当图形开始成为行业标准,计算设备需要同时处理数百万像素时,有些事情不得不改变。
因此,发明了GPU - 一种用于明确用于并行处理的设备。对于个人任务而不是CPU,它不会提供更低的延迟,但其吞吐量会将CPU从水中吹出。这使得该设备有用的是图形处理,以便CPU永远无法实现。
Nvidia Geforce 256,该公司的第一个GPU。图片由维基共享
今天,许多这样的公司苹果,谷歌和英特尔- 开发新形式的加速器,这一次是由于对人工智能计算的需求。
Robomorphic Computing:机器人的硬件加速度
遵循同样的思想,麻省理工学院的研究人员决定加速机器人计算引入具有个性化硬件加速的机器人。
他们的思考过程是一样的:如果所有的机器人都有不同的环境、不同的功能和不同的任务,为什么它们都要使用相同的处理单元呢?“万事通”的方法并不是最好的选择。
对个人机器人引入专业硬件的这种想法被研究人员称为“Robomorphic Computing”。
强制性计算工作原理
研究人员实现robomorphic计算通过创建一个软件系统,根据机器人的独特特征,构建定制的硬件。用户可以在软件中输入机器人的信息,包括它的肢体布局和每个关节的自由度。
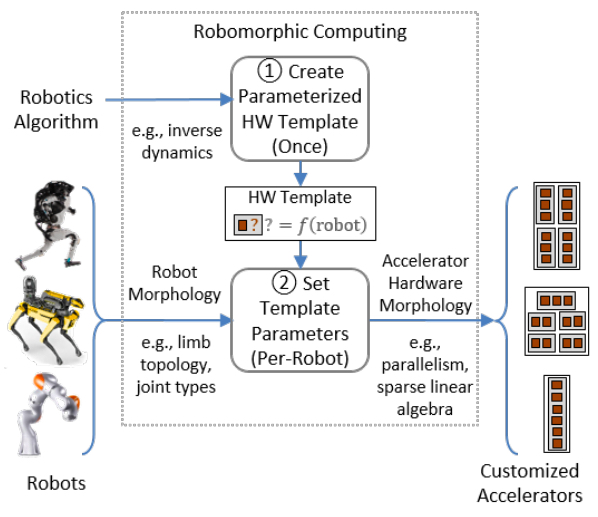
机械变形计算流程图。图片由纽曼等。
然后系统将这些数据组织成这些参数的稀疏矩阵,然后使用这些矩阵来确定机器人的最佳硬件架构。根据大学的新闻稿,该系统“暴露了在机器人四肢和连杆上迭代的算法循环中的并行性,并将其映射到硬件模板中的并行处理元素。”
通过这种方式,系统设计专门为特定机器人需求实现最大效率的硬件架构。
该团队没有为他们的机器人制造ASIC,而是制造了FPGA。尽管工作在较慢的时钟速度,他们的FPGA比CPU的性能好8倍,比GPU的性能好86倍。
具有专门的Asics的机器人
麻省理工学院表示,他们是第一个将个性化硬件加速带到机器人世界的公司,他们的软件和定制的FPGA在这一成就中发挥了重要作用。据创造“机器人形态计算”的团队称,他们可以预见未来,每个机器人都有自己的专用专用集成电路(ASIC)。





