
激光雷达当然是当今自动驾驶汽车和机器人营销中的一个流行词——而且有充分的理由。这项技术造就了计算机视觉的创新,最近的是火星坚持不懈的流浪者。
另一个宣布更具体地对激光器的设计级别细节发言,来自英特尔和STMicroelectronics,它与之合作最近发布了高分辨率MEMS激光乐裙相机。

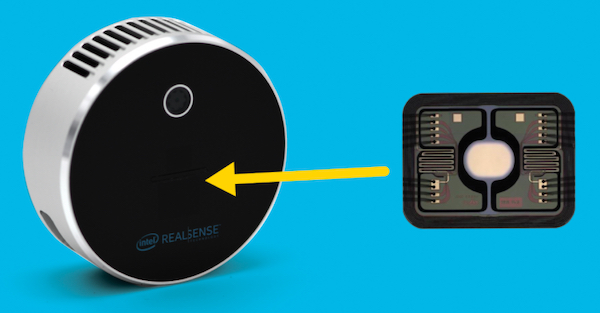
英特尔RealSense激光雷达相机L515的故障。图片由英特尔
作为这种新设备成功的一部分,ST指出其微镜扫描技术,该公司声称这是“世界上最小的”同类技术。据说,这种MEMs镜面可以使新型激光雷达相机对环境进行空间扫描,为许多工业应用提供高分辨率成像,如3D扫描、机器人拾取物品、物流和体积测量等。
MEMs激光雷达应用于准机械扫描
为了更好地理解本公告的细节,以下内容可能会有所帮助回顾MEMS LIDAR技术的基础知识(PDF),分类为“扫描激光雷达”(与非扫描激光雷达相对)。
扫描激光雷达引导激光束在一个大范围内有效地捕捉大视场(FOV)。这个过程本身可以采取机械扫描或非机械扫描的形式。前者利用激光系统中的运动部件,而后者不使用。
_LiDAR,_motorized_scanning_LiDAR,_and_MEMS_LiDAR.jpg)
从左到右:闪光激光雷达、光学相控阵激光雷达、电动扫描激光雷达、MEMS激光雷达。图片由王等。(PDF)
对于许多应用程序,MEMS LIDAR已被证明是一个有用的解决方案,因为它提供了一个包装的高速,小尺寸和高分辨率。
MEMS LIDAR是LIDAR的准机械形式,其中激光本身不会物理地移动,但是,相反,MEMS镜以这样的方式移动以转向并调节激光,而系统的其余部分是静止的。
MEMS镜像是如何工作的?
新闻稿的新闻稿英特尔RealSense Lidar相机L515ST的微镜技术是其成功的关键因素。这些设备在系统级别上究竟是如何工作的?
MEMS镜子非常紧凑,与其他机械扫描激光雷达方法相比,允许较小的形状系数,更快的控制速度,更快的控制速度,更精确的光转向。
这些设备通常需要一个高压驱动器来提供电压(从200v到300v)来移动镜子的位置。通过单片机或FPGA可以确定具体的驱动电压,同时控制激光二极管驱动器,协调反射镜和激光二极管的串联工作。
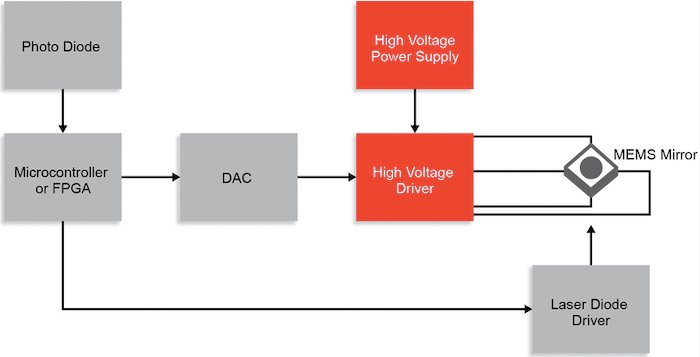
典型MEMs镜像系统框图。图片由微芯片
一个MEMs微镜系统通常还包括一个数模转换器(DAC)桥接控制器和放大器操作,以及一个光电二极管为闭环系统提供反馈。
意法半导体与英特尔结盟
经过六年的合作意法半导体、意法半导体和英特尔最近推出了一款以微镜扫描为技术亮点的MEMS激光雷达深度相机。
英特尔RealSense L515动画由ST的MEMs微镜。图片由意法半导体
以61毫米直径和26毫米高度的冰球形状,英特尔RealSense L515激光乐乐相机被两家公司作为全球最小的高分辨率Lidar深度相机吹捧。实现这种低尺寸的主要因素是MEMS镜面方法,其允许理想地宽的FOV,同时也将外形要素保持在最小。
至于技术参数,这款相机声称每秒30帧,视野为70°x 55°。根据数据表(PDF),该相机可以达到9米的范围和深度精度< 14毫米,同时仍然测量230万个深度点。
MEMS微镜打开许多LIDAR的门,但它们毫无疑问也有一些与其紧凑型有关的设计级别挑战。您是否与这些设备合作?在下面的评论中分享您的经验。





